|
|

|
Ĺrets stjärna Blue Star  är ett av ĺrets bidrag till robottävlingen pĺ magisterprogrammet i datorsystemteknik vid högskolan i Halmstad.
Roboten har byggts av Christian Dahlqvist och Henrik Hagström. Tävlingen ingĺr i kursen Mekatronik 4p. är ett av ĺrets bidrag till robottävlingen pĺ magisterprogrammet i datorsystemteknik vid högskolan i Halmstad.
Roboten har byggts av Christian Dahlqvist och Henrik Hagström. Tävlingen ingĺr i kursen Mekatronik 4p.
Tävlingen gĺr avstapeln den 26:e maj 2000 i G102 pĺ högskolan i Halmstad.  Uppgift Denna sidan Hur fungerar roboten?

 DSP och kamera, robotens syncentrum och öga.
Förutom själva kameran finns en digital signalprocessor, DSP, som skall behandla alla bilder som "ögat" ser.
Med behandling menas att tala om var i bilden de olika föremĺlen finns. Informationen skickas sedan vidare till robotens hjärna. DSP och kamera, robotens syncentrum och öga.
Förutom själva kameran finns en digital signalprocessor, DSP, som skall behandla alla bilder som "ögat" ser.
Med behandling menas att tala om var i bilden de olika föremĺlen finns. Informationen skickas sedan vidare till robotens hjärna.
 HC11:an är robotens hjärna.
Hjärnan utgörs av en microprocessor (MC68HC11A). Den samlar all data frĺn de olika sensorerna och DSP:n.
När all information övervägts ges styrsignaler till aktuatorerna, i detta fall motorer.
Besluten kan vara att köra fram eller tillbaka, svänga och lasta eller lossa pallar.
HC11:an är robotens hjärna.
Hjärnan utgörs av en microprocessor (MC68HC11A). Den samlar all data frĺn de olika sensorerna och DSP:n.
När all information övervägts ges styrsignaler till aktuatorerna, i detta fall motorer.
Besluten kan vara att köra fram eller tillbaka, svänga och lasta eller lossa pallar.
|
Mekaniken Mekaniken i roboten är inte helt enkel. Det gäller att bygga en robot som klarar av att bära all last. Det kräver en robust bottenplatta, samtidigt som den inte fĺr vara för tung.  Bottenplattan med all utrustning som skall ĺka med (och en röd pall i bakgrunden).
Bilen skall kunna gĺ helt själv och det innebär att det mĺste finnas kraft ombord för att kunna driva motorer och datorsystemet.
Bottenplattan med all utrustning som skall ĺka med (och en röd pall i bakgrunden).
Bilen skall kunna gĺ helt själv och det innebär att det mĺste finnas kraft ombord för att kunna driva motorer och datorsystemet.
 De tunga akumulatorerna.
Till detta används ackumulatorer (batterier), som är den tyngsta enskilda delen av bilen.
Det krävs dessutom en växellĺda för att motorn skall orka driva LEGO-bilen. Det gäller att utnyttja kraften i motorn pĺ ett förnuftigt sätt.
En snabb bil har inte lika mycket ork som en lĺngsammare beroende pĺ hur växellĺdan konstrueras.
De tunga akumulatorerna.
Till detta används ackumulatorer (batterier), som är den tyngsta enskilda delen av bilen.
Det krävs dessutom en växellĺda för att motorn skall orka driva LEGO-bilen. Det gäller att utnyttja kraften i motorn pĺ ett förnuftigt sätt.
En snabb bil har inte lika mycket ork som en lĺngsammare beroende pĺ hur växellĺdan konstrueras.
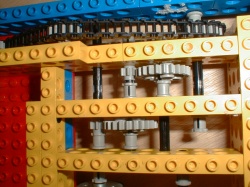 Ett exempel pĺ växellĺda (1 till 30).
Ĺrets upplaga av robotar mĺste dessutom pĺ nĺgot sätt kunna lasta och lossa pallarna.
Troligen kommer det att resultera i flera olika varianter pĺ gaffeltruckar.
Mekaniken styrs av motorer. Drivningen av hjulen stĺr tvĺ likströmsmotorer för.
Pĺ Blue Star styr de tvĺ motorerna varsin sida.
Den fungerar som en stridsvagn och kan därför vända pĺ mycket liten yta.
Ett exempel pĺ växellĺda (1 till 30).
Ĺrets upplaga av robotar mĺste dessutom pĺ nĺgot sätt kunna lasta och lossa pallarna.
Troligen kommer det att resultera i flera olika varianter pĺ gaffeltruckar.
Mekaniken styrs av motorer. Drivningen av hjulen stĺr tvĺ likströmsmotorer för.
Pĺ Blue Star styr de tvĺ motorerna varsin sida.
Den fungerar som en stridsvagn och kan därför vända pĺ mycket liten yta.
Mer läsning
|
|
©2000 Christian Dahlqvist, Henrik Hagström |