|
|

|
Mekniken Roboten smekanik består av LEGO först och främst, men också en rad motorer. 
 Axlar, bussningar, hjul, kugghjul och leder. Axlar, bussningar, hjul, kugghjul och leder.

 De olika motorerna som finns att tillgå.
Motorerna är tre likströmsmotorer, en servomotor och en stegmotor.
Likströmsmotorer används till drivningen för att köra roboten.
Det går inte att köra roboten direkt, utan en växellåda behövs för att få det att fungera.
Växellådan i Blue Star
De olika motorerna som finns att tillgå.
Motorerna är tre likströmsmotorer, en servomotor och en stegmotor.
Likströmsmotorer används till drivningen för att köra roboten.
Det går inte att köra roboten direkt, utan en växellåda behövs för att få det att fungera.
Växellådan i Blue Star ligger på 1:45.
Det kan tyckas trivialt att bygga en växellåda, men hänsyn måste tas till att det är LEGO man arbetar med.
Dessutom måste beslut tas hurvida den skall göra bilen stark eller snabb.
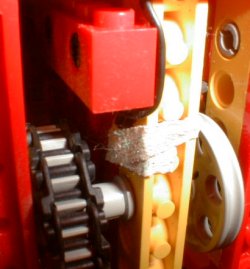
Växellådan i detta fallet ligger på 1:45 och driver bakhjulen. Via en kedjedrift överförs kraften även till framhjulen. ligger på 1:45.
Det kan tyckas trivialt att bygga en växellåda, men hänsyn måste tas till att det är LEGO man arbetar med.
Dessutom måste beslut tas hurvida den skall göra bilen stark eller snabb.
Växellådan i detta fallet ligger på 1:45 och driver bakhjulen. Via en kedjedrift överförs kraften även till framhjulen.
 Växellådan med kedjedrift.
Växellådan med kedjedrift.
 Friktionsanpassade hjul.
För att minska frikationen och kunna svänga lättare har roboten plastkugghjul i stället för de traditionella gummihjulen.
Styrning fungerar som en en stridsvagn, där ena sida driver framåt och den andra bakåt.
Till gaffeln används en servomotor som gör att man genom att ställa ut en vinkel till motorn exakt kan bestämm hur högt gaffeln skall lyftas.
Friktionsanpassade hjul.
För att minska frikationen och kunna svänga lättare har roboten plastkugghjul i stället för de traditionella gummihjulen.
Styrning fungerar som en en stridsvagn, där ena sida driver framåt och den andra bakåt.
Till gaffeln används en servomotor som gör att man genom att ställa ut en vinkel till motorn exakt kan bestämm hur högt gaffeln skall lyftas.
 Gaffeln på roboten.
Gaffeln på roboten.
 Sevomotorn som styr gaffeln.
Sevomotorn som styr gaffeln.
|
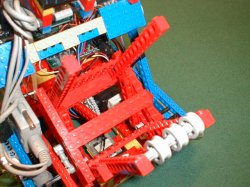
Kameran på Blue Star har fått en speciell infästning. För att kunna ställa in vinkeln på kameran har en "hiss" kontruerats så att en a sidan kan höjas och säknas med god precision.
 Den lilla unika hissen.
Dags att ta en titt på givare och sensorer som sitter på roboten. På gaffeln sitter en sensor som känner av ljus. Den används för att detektera om en pall ligger på gaffeln eller inte.
Den lilla unika hissen.
Dags att ta en titt på givare och sensorer som sitter på roboten. På gaffeln sitter en sensor som känner av ljus. Den används för att detektera om en pall ligger på gaffeln eller inte.
 Ljussensorn som sitter på gaffeln.
Vidare används mikrobrytare både i fronten och baken av bilen så att det går att känna om roboten kört emot något.
Ljussensorn som sitter på gaffeln.
Vidare används mikrobrytare både i fronten och baken av bilen så att det går att känna om roboten kört emot något.
 Mikrobrytare i fronten av roboten, och avståndsgivaren i mitten.
I mitten fram på bilen sitter också en avståndsmätare som kan detekter avståndet fram till ett föremål. Den variant som används här är dock begränsade till området 5 till 30 centimeter.
Mikrobrytare i fronten av roboten, och avståndsgivaren i mitten.
I mitten fram på bilen sitter också en avståndsmätare som kan detekter avståndet fram till ett föremål. Den variant som används här är dock begränsade till området 5 till 30 centimeter.
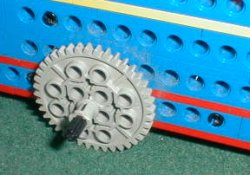
 Varvräknare.
Slutligen så finns sensorer inbyggade vid hjulen som kan känna av ett antal pulser per varv som roboten går. Detta gör det möjligt att bestämma körsträckan. En liten lysdiod lyser medan en skiva med hål i snurrar med hjulaxeln. När ljuset går genom ett hål registreras detta av ljussensorn som sitter på andra sidan skivan.
Varvräknare.
Slutligen så finns sensorer inbyggade vid hjulen som kan känna av ett antal pulser per varv som roboten går. Detta gör det möjligt att bestämma körsträckan. En liten lysdiod lyser medan en skiva med hål i snurrar med hjulaxeln. När ljuset går genom ett hål registreras detta av ljussensorn som sitter på andra sidan skivan.
|
|
©2000 Christian Dahlqvist, Henrik Hagström |