|
|

|
Tävlingsstrategi Hur tänkte vi när det gällde strategin för tävlingen? Först och främst var tävlingen uppdelad i kval och tävling, och därför studeras kvalet först. Kvalet Den enda bilen i startfältet som kan köra mot sargen och indikera detta. De andra bilarnas gafflar tog i sargen. Detta bestämde vi oss för att utnyttja.  Tanken var att kunna veta exakt var pallarna placerades i boet, genom att docka bilen mot sargen och sedan backa ut en förutbestämd längd och placera pallen pĺ kajen.
Pĺ sĺ sätt tar vi bort tiden det tar för att bildbehandla och hitta kajen, _och_ att undvika pallar som stĺr pĺ den samma.
Ett kval börjar med att bilen stĺ mitt pĺ planen, pĺ den sida som det egna boet befinner sig pĺ.
Tanken var att kunna veta exakt var pallarna placerades i boet, genom att docka bilen mot sargen och sedan backa ut en förutbestämd längd och placera pallen pĺ kajen.
Pĺ sĺ sätt tar vi bort tiden det tar för att bildbehandla och hitta kajen, _och_ att undvika pallar som stĺr pĺ den samma.
Ett kval börjar med att bilen stĺ mitt pĺ planen, pĺ den sida som det egna boet befinner sig pĺ.
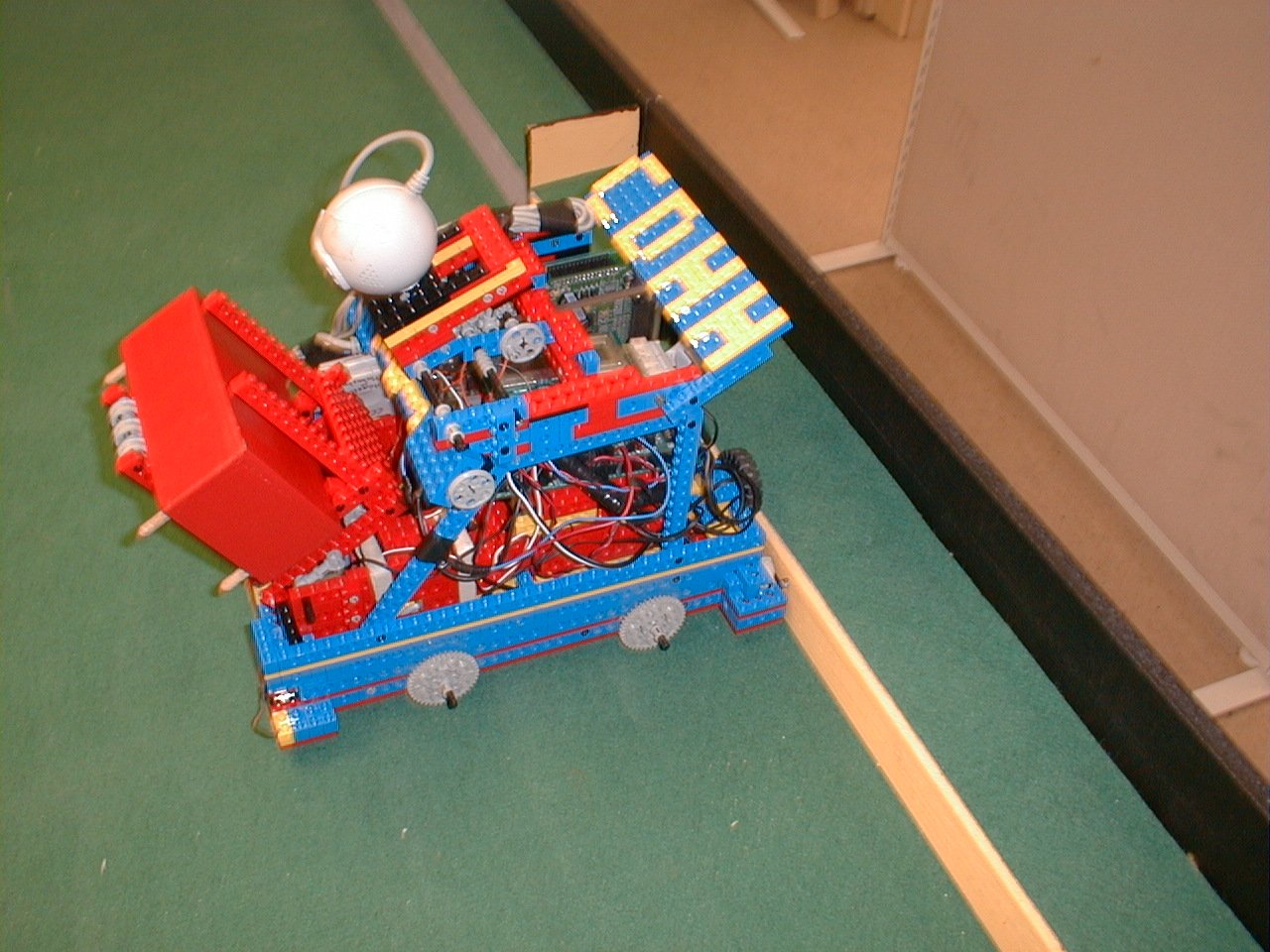
 Startposition och den första hämtningen.
Startposition och den första hämtningen.Mĺlet är sedan att ta den andra pallen pĺ den egna planhalvan. Detta därför att det kan bli knepigt om andra vill komma ĺt den i mitten samtidigt. Sammanfattat kan det beskrivas att ta den pall närmast motdstĺndaren utan att rĺka i trubbel. Dessutom kan pallens placering uppskattas och pĺ sĺ sätt göra det lättare för roboten dĺ den skall hämta pallen. Desto bättre styrsignaler som bildbehandlingen ger frĺn börja, ju snabbare kan en pall hämtas.
Eftersom detta är kvalprogrammet kan det tyckas att ingen hänsyn skulle behöva tas till andra robotar. Tanken är att programmet blir mer testat om samma rutin kan användas i kval som tävling, därför kommer viss kod att ĺteranvändas för tävlingsloppet (de tvĺ första hämntningarna).
När klossen hämtats sĺ gäller det att ta sig till sitt eget bo pĺ snabbast möjliga sätt. Metoden som valdes var att backa i fullfart över spelplanen.
 Roboten framme efter att backat över spelplanen.
Roboten framme efter att backat över spelplanen.När roboten är framme sĺ finns informationen att den stĺr mot kajen. Roboten vänder upp 90o och kör mot sargen. Genom pulsräknarna pĺ hjulen kan nu robeten backa lagom lĺngt för att sedan ställa av pallen.  Lämnar av den första pallen.
Lämnar av den första pallen.Den som är uppmärksam ser att pallen inte stĺr pĺ benen, och frĺgan blir varför?
Jo, pĺ tävlingen kommer det att göra sĺ ingen annan kan ta pallen frĺn boet. Ĺtminstone inte de robotar som deltar i vĺrt race.
Under kvalet sĺ puttas pallen in en bit och undviker pĺ sĺ sätt att trilla ut pĺ spelplanen, vilket hände under testningen.
 Pallen säkras i det egna boet.
Pallen säkras i det egna boet. |
När bilen sedan vänder runt 180o borde den stĺ nästan rakt framför pallen längst till kanetn pĺ den egna planhalvan.
Hämtningen sker pĺ samma sätt. När den tredje pallen skall hämtas körs roboten en bit in pĺ motstĺndarens halva och hämtar pall för pall.
Efter cirka 1.40 min har fyra pallar hämtats och det är lite trĺngt i boet.
Efter att dockat mot sargen palceras bilen pĺ ett sĺdant sätt att den körs mot sargen och "kanar" in sĺ lĺngt ut mot kanten som gĺr och lämnar den sista pallen om tid ges.
 Pallarna lämnas i boet. Den sista trycks in vid kanten.
Pallarna lämnas i boet. Den sista trycks in vid kanten.
Tävlingen Tävlingsprogrammet "lĺnade" kod frĺn kvalprogrammet. De tvĺ första pallarna hämtades pĺ samma sätt. När sĺ de tvĺ pallarna är pĺ plats och roboten ger sig ut pĺ banan igen sĺ kommer nyheterna i programmet. Bilen vänder upp och och kör över planen mot motstĺndarens planhalva. Om inget hindra den pĺ vägen kommer den att docka mot sargen, vända upp mot motstĺndarens bo och undersök om det finn nĺgon pall att ta.
Finns det en pall tar roboten den och vänder upp för att köra hem igen. Skulle den hindras pĺ vägen stannar den och lägger pallen pĺ spelplanen. Ingen robot kan ta upp pallen dĺ, och eftersom tvĺ redan är säkrade i boet sĺ gör det att minst ett oavgjort resultat kommer att nĺs.
Skulle roboten träffa pĺ ett hinder innan den hunnit docka mot sargen backar den tillbaka och kör fram ett par gĺnger för att fĺ den andra roboten ur läge. Därefter kör den upp mot den gemensamma kajen för att komma runt motstĺndaren. Den ställer sig en bit bort nära motstĺndarens sarg kant och väntar lite sĺ att den hinner flytta pĺ sig.
Nu kan roboten göra ett nytt försök att hämta pallar i motstĺndarboet.
Skulle ingen pall hittas gäller det att irritera motstĺndaren sĺ mycket det gĺr. Roboten dockar baken mot sargen och kör fram och tillbaka framför kajen sĺ att inte motstĺndaren hittar den. Genom att fälla ner gaffeln skymms ännu mer av kajen.
 Stör motstĺndaren genom att skymma kajen.
Allt skull fungera väl om det inte vore för slumpen. När tvĺ robotar med egen vilja kör pĺ planen störs strategin som lagts upp.
Vinnaren blir troligen den som har den mest robusta roboten och klara av att hantera slumpen bäst. Frĺgorna som ställs är hur man skall hantera situationen om bilarna koliderar?
Hur skall detta detekteras? Vad skall göras om bildbehanslingen slutar fungera? Hur detekteras avstĺndet till sargen i sidled? Mĺnga frĺgor som skall avvägas och tillsammans ge ett robust mekatroniskt system.
Stör motstĺndaren genom att skymma kajen.
Allt skull fungera väl om det inte vore för slumpen. När tvĺ robotar med egen vilja kör pĺ planen störs strategin som lagts upp.
Vinnaren blir troligen den som har den mest robusta roboten och klara av att hantera slumpen bäst. Frĺgorna som ställs är hur man skall hantera situationen om bilarna koliderar?
Hur skall detta detekteras? Vad skall göras om bildbehanslingen slutar fungera? Hur detekteras avstĺndet till sargen i sidled? Mĺnga frĺgor som skall avvägas och tillsammans ge ett robust mekatroniskt system.
|
|
©2000 Christian Dahlqvist, Henrik Hagström |